| Version 2 (modified by obina, 6 years ago) (diff) |
|---|
Arduino と EPICS を使った簡単な例
家庭でも遊べるように、簡単なサンプルをつくることが目的。
「ArduinoはUSBシリアル経由でデータを垂れ流しにする」「EPICS IOC(Raspberry Pi) 側からコマンドは送らず、Listenするのみ」という構成にする。
準備
- Arduino Uno
- PC
- Arduino 統合開発環境(IDE)を公式サイト( https://www.arduino.cc/en/Main/Software )からダウンロード・インストールする
- 今回は Windows / ver 1.8.7 を使用した
- Raspberry Pi
- 今回はRaspberry Pi2 Model Bを使用した(Pi3でも可能のはず)
- EPICSインストールについては別の記事を参照
- USB ケーブル
- ブレッドボード、ジャンパーケーブル等
- 半固定抵抗と固定抵抗(今回は手元にあった 1kΩのモノを使用)
方針
[RasPi (epics IOC)] --(USB)--[Arduino AnalogIN] -- 可変抵抗に5V印加
- アナログ入力を読み込み、シリアル経由でホストに通信。最初はPCを使って動作検証し、その後でEPICS化する。
- Arduino Uno の場合、0-5Vを 10bit(0-1024)で読み込むことが可能
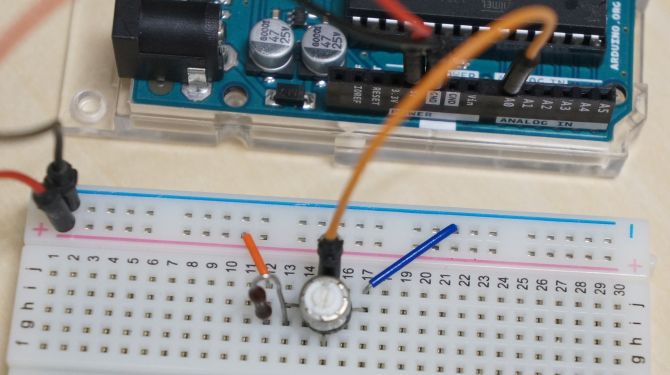
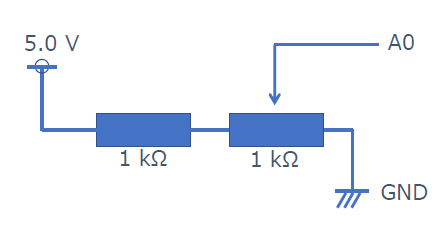
- 5V 電圧+可変抵抗+固定抵抗(破損防止)で
- 今回は手元にあった 1kΩの可変抵抗+1kΩの固定抵抗
- ブレッドボードに配線[図]
動作確認
PCを使ってスケッチの検証
構成としては
[PC] --[USB]--[Arduino]--AnalogIN
という単純な構成。
1秒に1回、ADCの値をシリアル経由でホストPCに送るスケッチを作成する。
int analogPin = 0;
int val = 0;
void setup() {
Serial.begin(19200);
}
void loop() {
val = analogRead(analogPin);
Serial.println(val);
delay(1000);
}
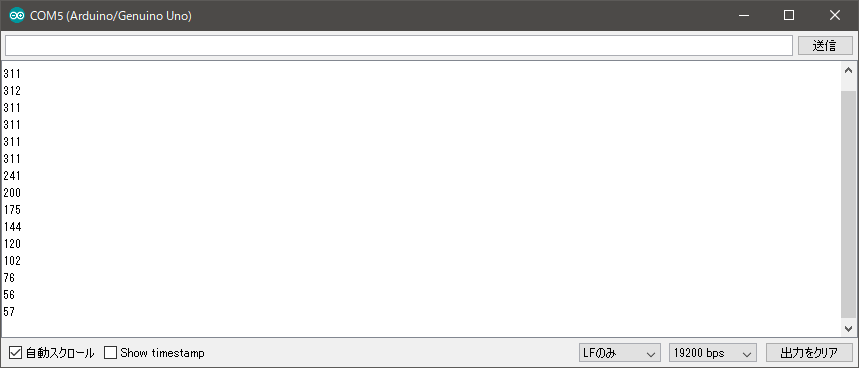
Arduinoにダウンロードし、IDEで「シリアルモニター」を開くと、1秒に1回ADCのカウント値が表示される。
この状態で可変抵抗を動かすと、カウント値が変わることを確認する。

Raspberry Pi に接続
次にUSBケーブルをPCから抜いて、Raspberry Pi に Arduino を接続する。
まずは dmesg を確認
[ 3433.753691] usb 1-1.2: new full-speed USB device number 6 using dwc_otg [ 3433.898077] usb 1-1.2: New USB device found, idVendor=2a03, idProduct=0043 [ 3433.898099] usb 1-1.2: New USB device strings: Mfr=1, Product=2, SerialNumber=220 [ 3433.898109] usb 1-1.2: Product: Arduino Uno [ 3433.898120] usb 1-1.2: Manufacturer: Arduino Srl [ 3433.898129] usb 1-1.2: SerialNumber: [ 3433.938398] cdc_acm 1-1.2:1.0: ttyACM0: USB ACM device [ 3433.939634] usbcore: registered new interface driver cdc_acm [ 3433.939644] cdc_acm: USB Abstract Control Model driver for USB modems and ISDN adapters
のように、ttyACM0 として認識されている。となればあとは簡単で、rootになってから適当なターミナルプロ ラムで接続すれば良い。ここでは使いなれた GNU Screen を使って、デバイス名と通信速度を指定する
pi@raspberrypi:~ $ sudo su - root@raspberrypi:~# screen /dev/ttyACM0 19200
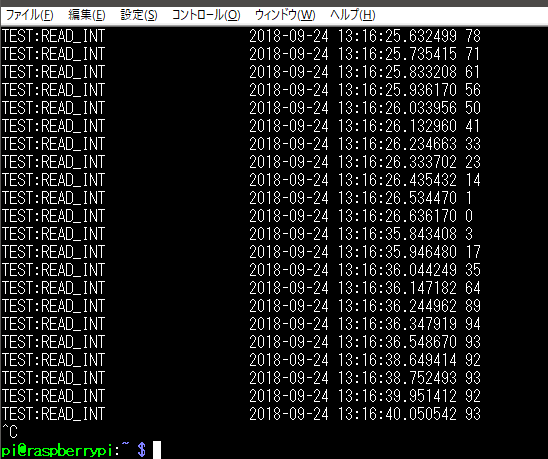
正常に接続できれば、1秒ごとにターミナル上にADCカウント値が表示される。
GNU Screenを終了するにはホットキー(デフォルトではCTRL-a)を押してから、kを押せば良い(killコマンド)。
※分からなければgoogleで 「GNU Screen の使い方」を検索
EPICS IOC 作成
makeBaseApp
ここまでくれば、あとはEPICSのIOCを書く。 単純に Stream Device で読み込むだけで良いので、 simpleReadという名前でapplicationを作る。
pi@raspberrypi:~/epics/app/arduino $ makeBaseApp.pl -t ioc simpleRead
pi@raspberrypi:~/epics/app/arduino $ makeBaseApp.pl -i -t ioc simpleRead
Using target architecture linux-arm (only one available)
The following applications are available:
simpleRead
What application should the IOC(s) boot?
The default uses the IOC's name, even if not listed above.
Application name?
pi@raspberrypi:~/epics/app/arduino $
configure/RELEASEを編集
pi@raspberrypi:~/epics/app/arduino $ vi configure/RELEASE ASYN=/opt/epics/R315.5/modules/soft/asyn/4-31 STREAM=/opt/epics/R315.5/modules/soft/stream/2-7-7
src ディレクトリでの作業
srcディレクトリで、MakefileにstreamDeviceの
- SerialPortドライバーを追加
- asyn ライブラリを追加
の2つを追記
pi@raspberrypi:~/epics/app/arduino/simpleReadApp/src $ vi Makefile # simpleRead.dbd will be made up from these files: simpleRead_DBD += base.dbd # Include dbd files from all support applications: simpleRead_DBD += asyn.dbd simpleRead_DBD += stream.dbd simpleRead_DBD += drvAsynSerialPort.dbd # Add all the support libraries needed by this IOC simpleRead_LIBS += asyn simpleRead_LIBS += stream
Database ディレクトリでの作業
Dbディレクトリでdatabaseファイルを追加。スキャンを"I/O Intr"にすることで、シリアル経由でデータが来たときのみレコードをプロセスする。
vi read1.db
record(longin, "TEST:READ_INT") {
field(DESC, "adc raw input")
field(DTYP, "stream")
field(INP, "@simple.proto getval PS1")
field(SCAN, "I/O Intr")
}
Dbディレクトリの Makefile に db ファイルを追加
pi@raspberrypi:~/epics/app/arduino/simpleReadApp/Db $ vi Makefile DB += read1.db
Dbディレクトリに protocol file を作成。数値を"%d"で変換するのみなので単純。エラー時に
pi@raspberrypi:~/epics/app/arduino/simpleReadApp/Db $ vi simple.proto
Terminator = CR LF;
getval {
in "%d";
}
make すると、とても遅い。セルフコンパイルなので仕方ない(クロスコンパイル環境を整えたい)
stream device のサイト http://epics.web.psi.ch/software/streamdevice/ も参照。
startup
startupディレクトリで st.cmd コマンド編集
pi@raspberrypi:~/epics/app/arduino/iocBoot/iocsimpleRead $ vi st.cmd
dbLoadRecords("db/read1.db")
epicsEnvSet("STREAM_PROTOCOL_PATH", ".:../../simpleReadApp/Db")
drvAsynSerialPortConfigure ("PS1","/dev/ttyACM0")
asynSetOption ("PS1", 0, "baud", "19200")
pi@raspberrypi:~/epics/app/arduino/iocBoot/iocsimpleRead $ chmod +x st.cmd pi@raspberrypi:~/epics/app/arduino/iocBoot/iocsimpleRead $ sudo ./st.cmd
エラーが出ていないことを確認すること。
Client
別ターミナルを開いて、
camonitor TEST:READ_INT
とする。
あるいは、PC上でCSSを実行して、このレコードをモニター・グラフ表示する。
※ 以上の動作が確認できたら、Arduinoスケッチで Delay 1000 としているところを、 100 ms に設定すると 可変抵抗を動かしたときの応答が滑らかになる。Arduinoは高速で動いているのに対して、EPICSを使うことで camonitor 機能があるため値が変化したときのみデータ通信を行うことが実現できている。


Attachments (8)
- aruduino001.png (13.1 KB) - added by obina 6 years ago.
- aruduino002.png (6.7 KB) - added by obina 6 years ago.
- aruduino003.png (8.6 KB) - added by obina 6 years ago.
- aruduino005.png (33.3 KB) - added by obina 6 years ago.
- aruduino004b.png (15.3 KB) - added by obina 6 years ago.
- DSC05620s.jpg (91.3 KB) - added by obina 6 years ago.
- circuit.png (6.1 KB) - added by obina 6 years ago.
- arduino_simple.tar.gz (4.0 KB) - added by obina 6 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip